Abstraction-Based Multi-Vehicle Command and Control
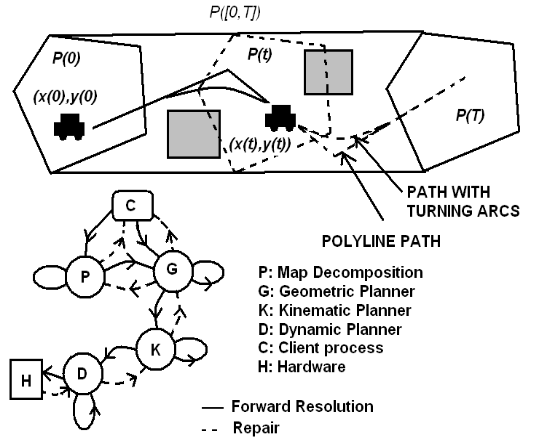
This work introduces an encapsulation approach to path planning for multi-vehicle control that permits other decision processes to work with simple, spatially-abstracted domain models, and partially or wholly ignore obstacles, observation uncertainty and vehicle dynamics. Application to multi-vehicle command and control has been considered.
Tichakorn (Nok) Wongpiromsarn
Assistant Professor
My research focuses on formal methods, motion planning, situational reasoning, hybrid systems, and distributed control systems.